{kind=link}
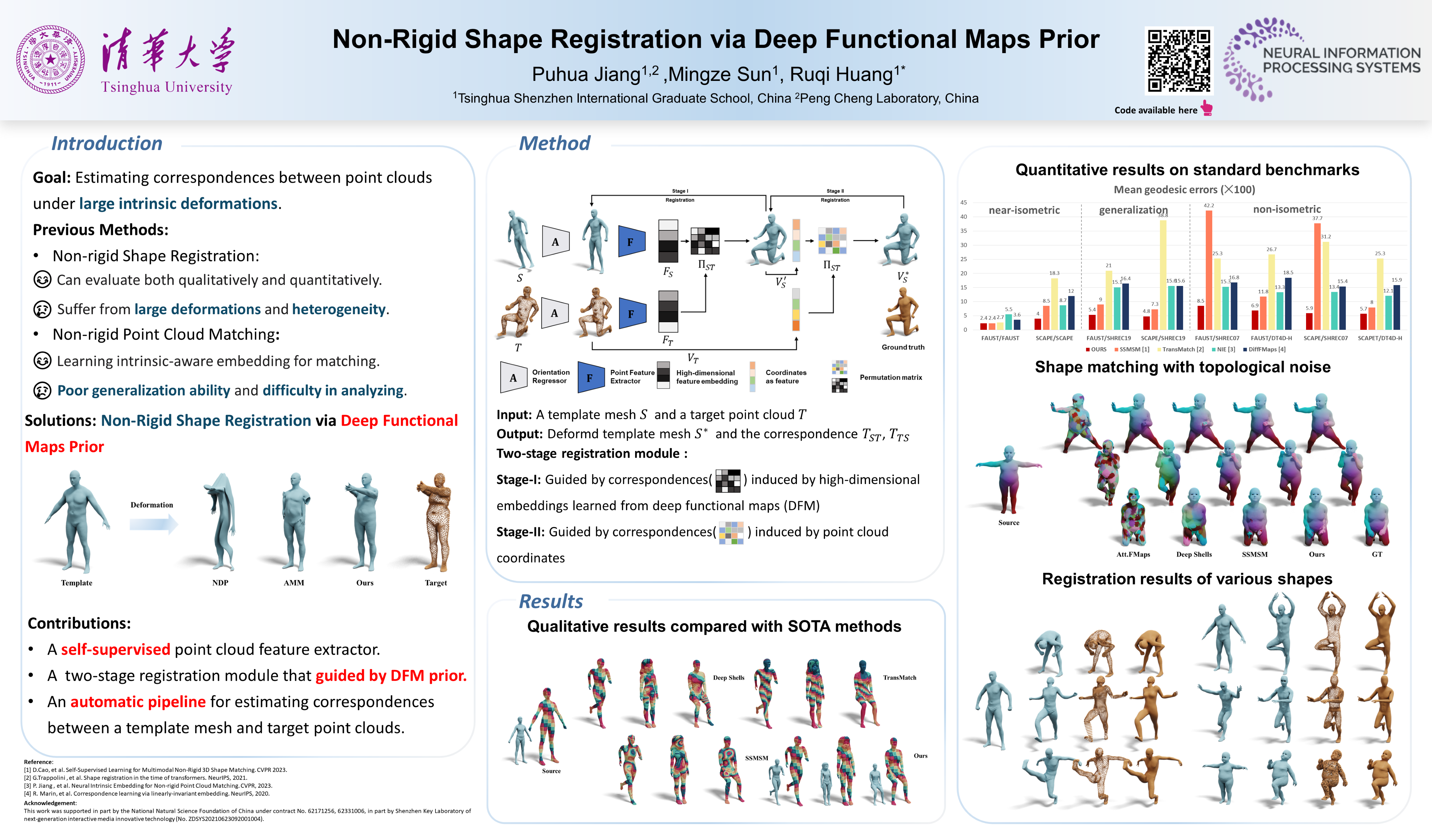
In this paper, we propose a learning-based framework for non-rigid shape registration without correspondence supervision. Traditional shape registration techniques typically rely on correspondences induced by extrinsic proximity, therefore can fail in the presence of large intrinsic deformations.
Spectral mapping methods overcome this challenge by embedding shapes into, geometric or learned, highdimensional spaces, where shapes are easier to align. However, due to the dependency on abstract, non-linear embedding schemes, the latter can be vulnerable with respect to perturbed or alien input. In light of this, our framework takes the best of both worlds. Namely, we deform source mesh towards the target point cloud, guided by correspondences induced by high-dimensional embeddings learned from deep functional maps (DFM). In particular, the correspondences are dynamically updated according to the intermediate registrations and filtered by consistency prior, which prominently robustify the overall pipeline. Moreover, in order to alleviate the requirement of extrinsically aligned input, we train an orientation regressor on a set of aligned synthetic shapes independent of the training shapes for DFM.
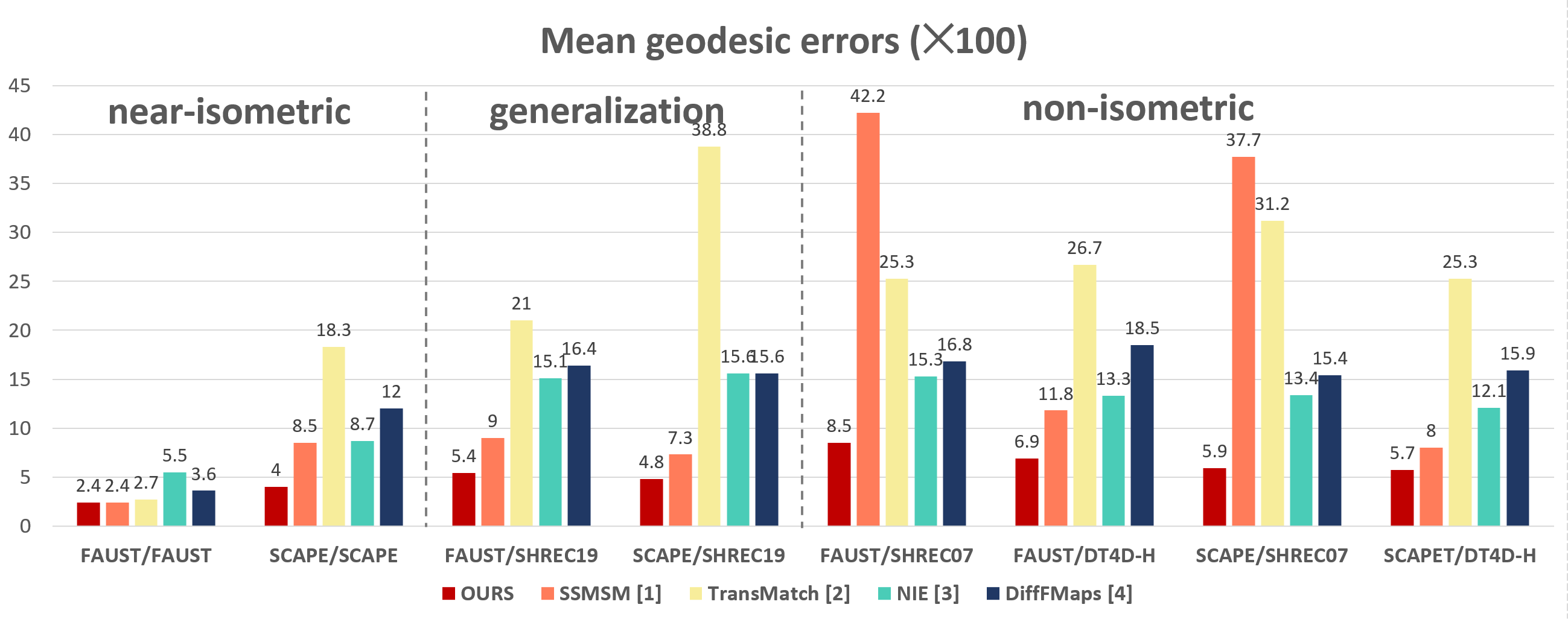
Empirical results show that, with as few as dozens of training shapes of limited variability, our pipeline achieves state-of-the-art results on several benchmarks of non-rigid point cloud matching, but also delivers high-quality correspondences between unseen challenging shape pairs that undergo both significant extrinsic and intrinsic deformations, in which case neither traditional registration methods nor intrinsic methods work.
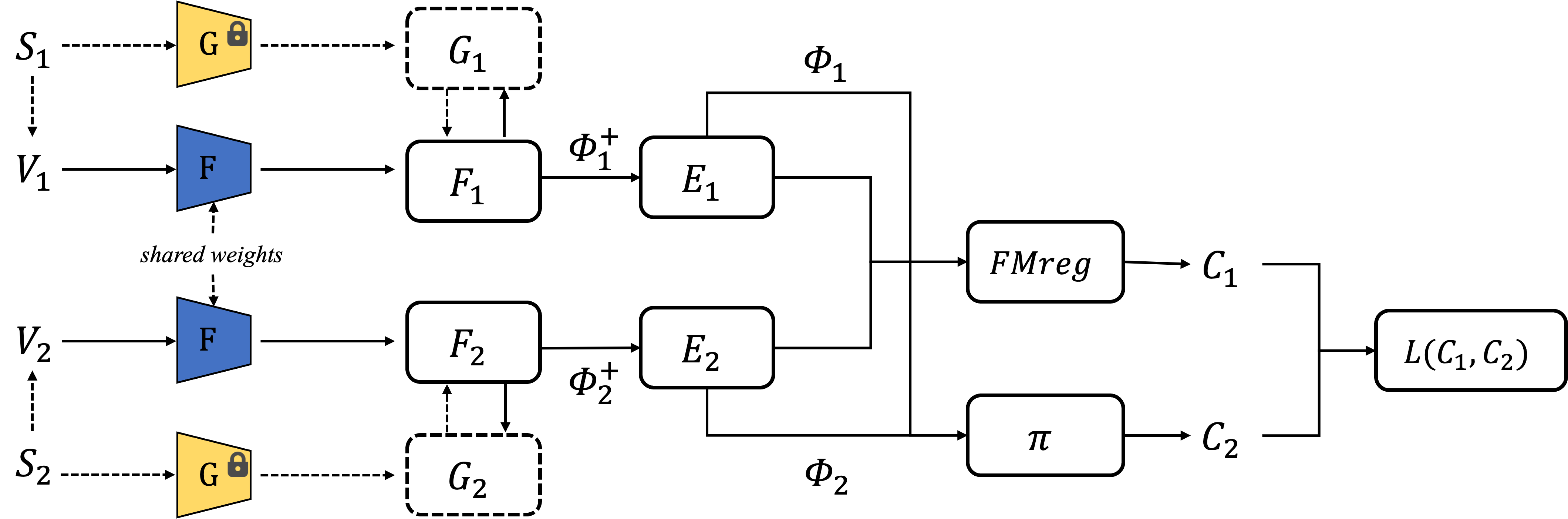
Our proposed architecture for training a point-based DFM, which is self-supervised by its mesh-based counterpart. G is a DFM network pre-trained on a collection of meshes. Then we train a DFM network F on the corresponding vertex sets.
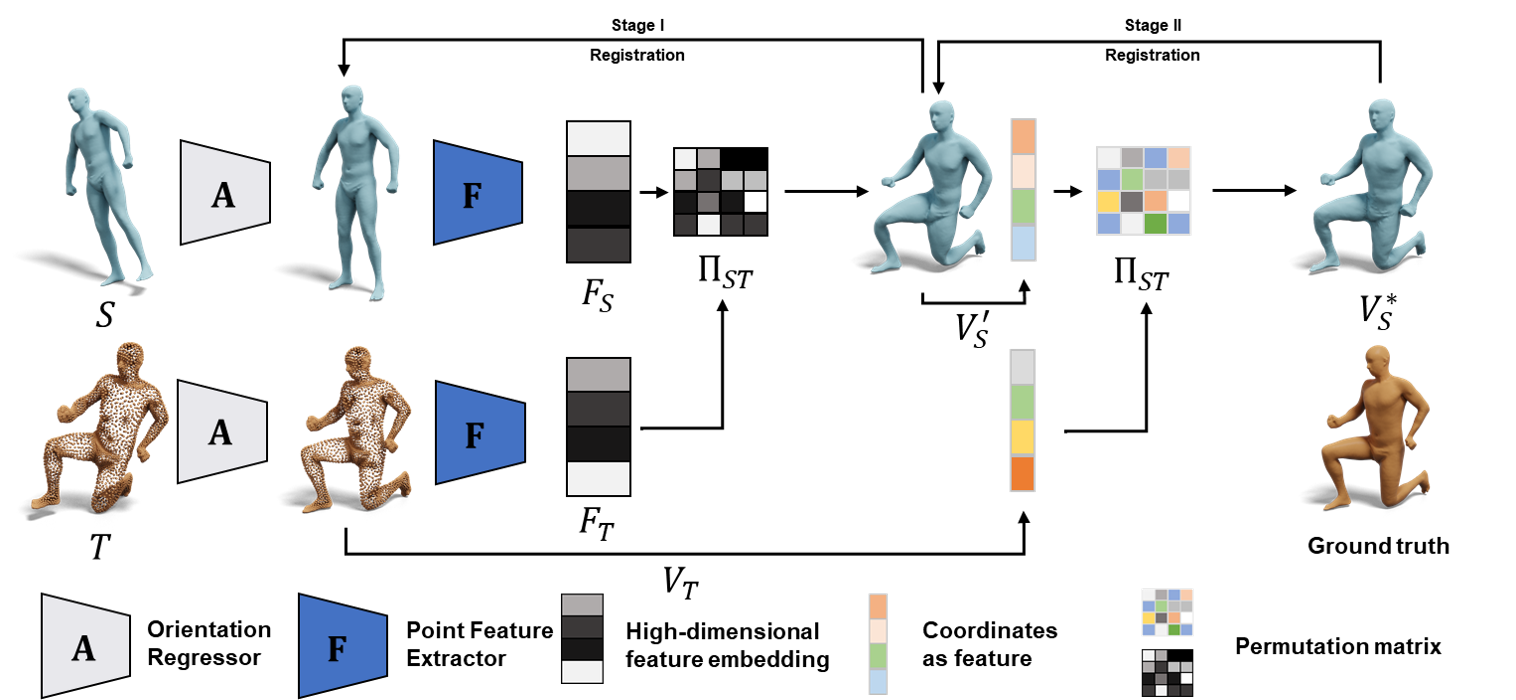
The schematic illustration of our pipeline. A is a pre-trained orientation regressor for aligning input shapes. Then a pre-trained feature extractor F embeds them into a high-dimensional canonical space. During the iterative optimization procedure of registration, correspondences are dynamically updated according to learned features (Stage-I) and coordinates (Stage-II) of the intermediate shapes. See more details in the main paper.
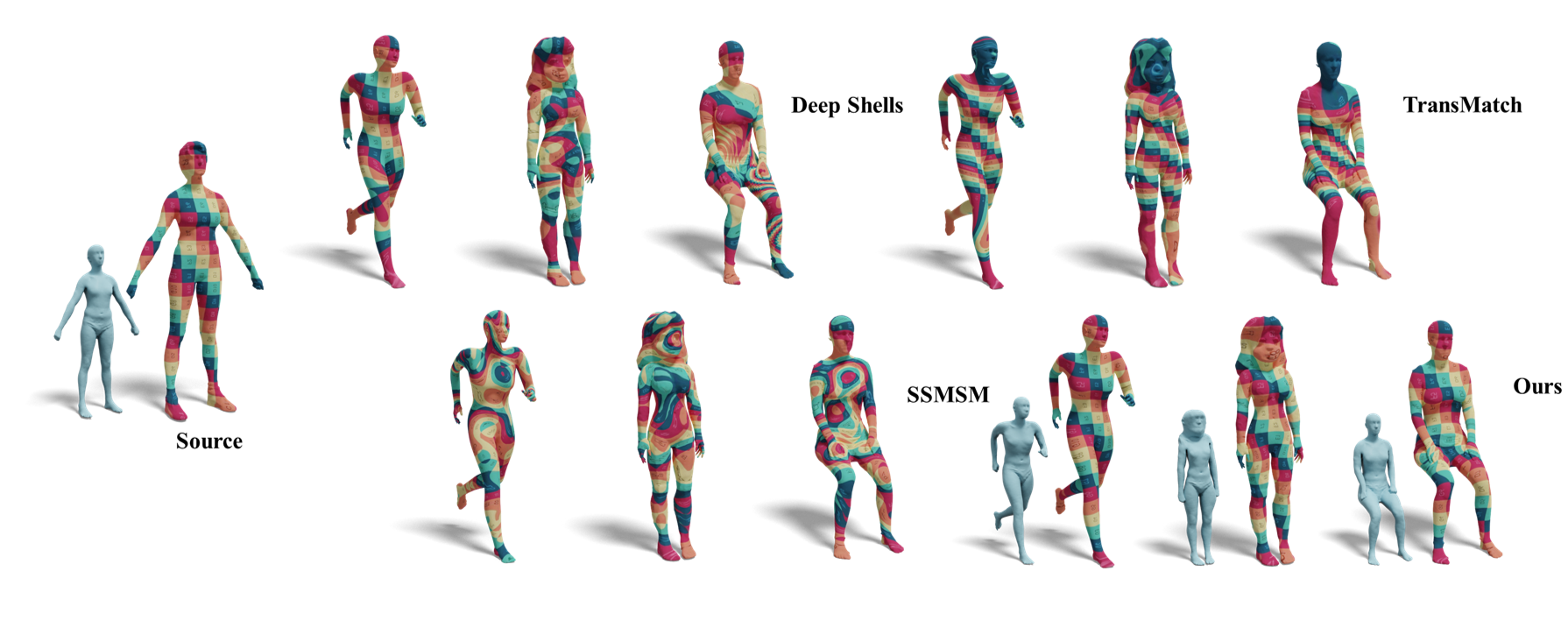
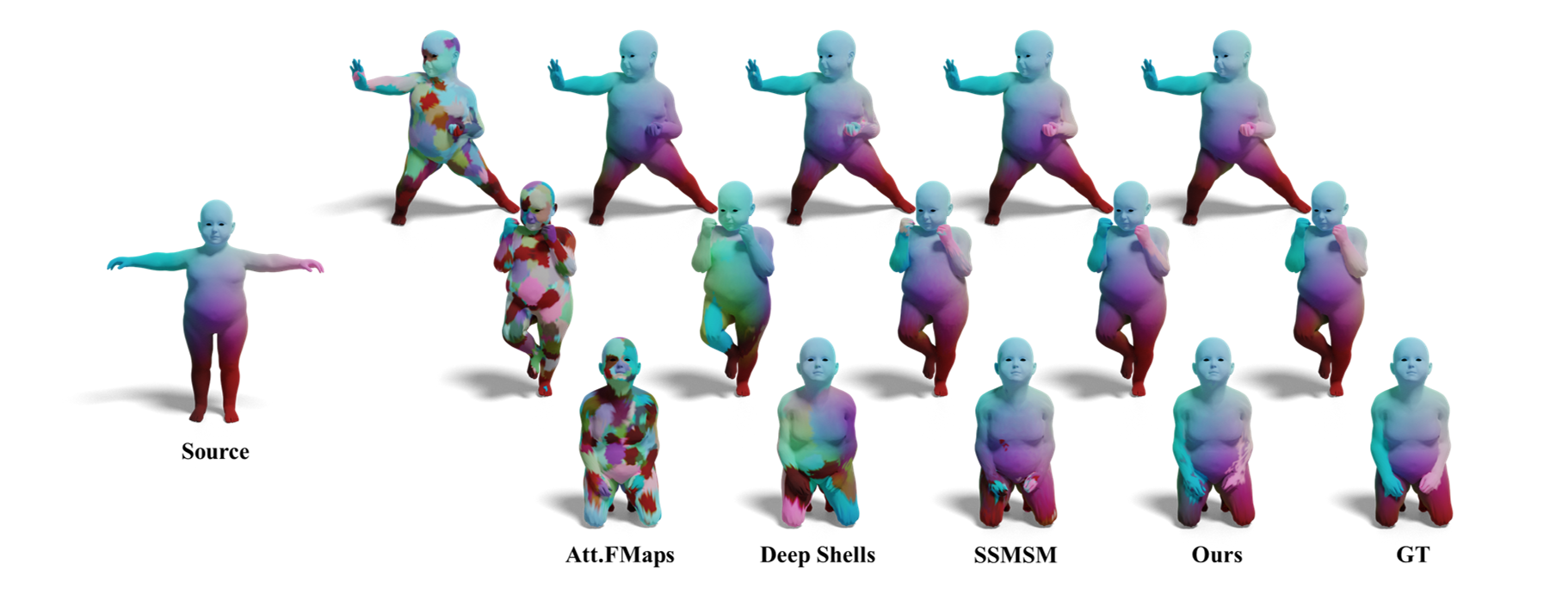
 We showcase the qualitative results of our evaluations on TOPKIDS, trained using the SCAPE_r dataset.
Our method reliably exhibits robustness in noisy mesh topology regions, consistently maintaining high performance.
We showcase the qualitative results of our evaluations on TOPKIDS, trained using the SCAPE_r dataset.
Our method reliably exhibits robustness in noisy mesh topology regions, consistently maintaining high performance.
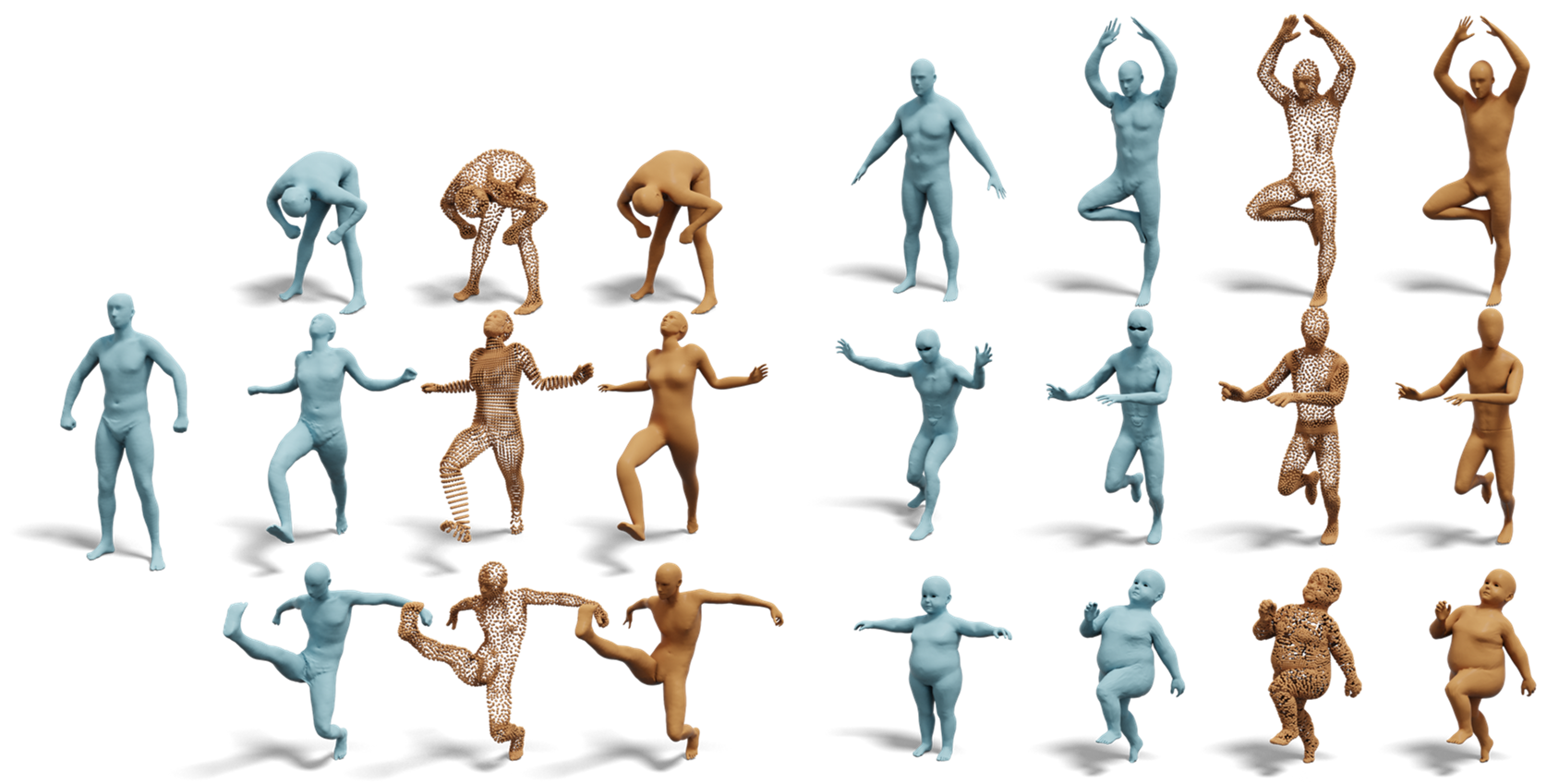
 More non-rigid shape registration results. The original source mesh and its deformed
counterpart are represented in blue, while the target point cloud and the ground truth mesh are
depicted in orange.
More non-rigid shape registration results. The original source mesh and its deformed
counterpart are represented in blue, while the target point cloud and the ground truth mesh are
depicted in orange.
@article{jiang2023non,
@inproceedings{NEURIPS2023_b654d615,
author = {Jiang, Puhua and Sun, Mingze and Huang, Ruqi},
booktitle = {Advances in Neural Information Processing Systems},
editor = {A. Oh and T. Neumann and A. Globerson and K. Saenko and M. Hardt and S. Levine},
pages = {58409--58427},
publisher = {Curran Associates, Inc.},
title = {Non-Rigid Shape Registration via Deep Functional Maps Prior},
url = {https://proceedings.neurips.cc/paper_files/paper/2023/file/b654d6150630a5ba5df7a55621390daf-Paper-Conference.pdf},
volume = {36},
year = {2023}
}
}